Hello,
I am currently working with a rigid mount setup between the Magic Leap 2 and an external positioning system, for which we know the exact physical origin.
To calculate and apply the position and rotation offset between both systems, I need to determine the exact origin of the Magic Leap 2. I have read an earlier post [Link] mentioning this topic, but I still need to clarify several points, so I have broken them down below:
1. Origin differences between model files
We notice a difference between the origin of the FBX file and the STEP file provided in the Magic Leap downloads.
Which of these should be considered the true origin position of the device — the FBX or the STEP reference?
FBX File (ML2-Headset_1.2.1.fbx)

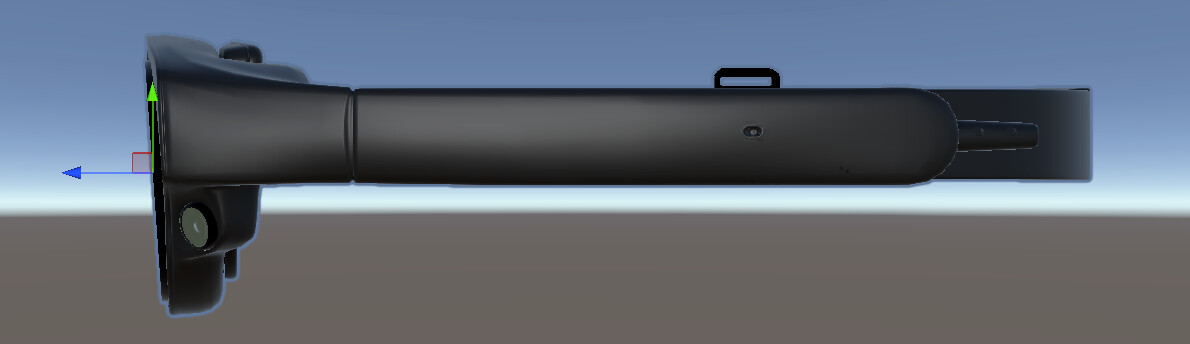
STEP File (ML2_HEADSET_3D-CAD_BASE_20221103.stp)

2. Eye Center reference
In the earlier post, there was mention of an “EyeCenter” position, but we cannot find any such node in the hierarchy of either the FBX or STEP models.
-
Is this
EyeCenterposition represented anywhere in these models, or -
Is it a virtual reference point accessible via code (e.g., through the OpenXR or Unity SDK)?
3. Consistency of the origin
Does the origin remain fixed, or can it change dynamically depending on settings — for example, when the Experimental Eye Tracker is enabled or disabled? We currently have that setting disabled and want to confirm whether the origin is always in the same place in the device coordinate frame.
4. Rotation alignment
When assigning a rotation offset between our external system and the ML2, we want to ensure we are using the correct reference axis.
-
Should the origin itself be used as the rotational pivot point?
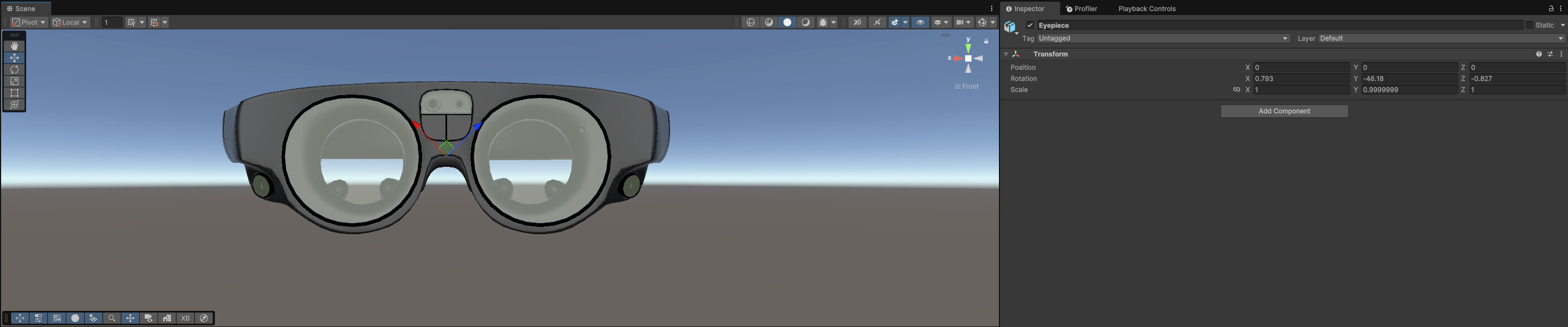
-
Or does the Eyepiece (waveguide lens housing) have any relevance for determining the rotation axis or orientation?
Any official clarification on these points would be beneficial for establishing accurate coordinate alignment between the Magic Leap 2 and our external tracking system.
Thank you in advance for your assistance.